
自從1990年代末期,達文西機器手臂(Vinci™ Robotic System)問世以來,為泌尿科微創手術開創了一個新的紀元〔1〕。從2001年泌尿科首次使用機器手臂完成攝護腺根除手術到目前為止,美國90%的攝護腺根除手術是由機器手臂來完成的〔2〕。現在有更多的趨勢顯示,機器手臂可以使用在泌尿科更多的領域,例如重建外科手術、尿路結石、和前列腺增生症(BPH)的處理。因此機器手臂的技術和設計會不斷的推陳出新,讓手術更精確、操作更人性化。
 ▓第4代達文西手術系統(Da Vinci Xi System)
▓第4代達文西手術系統(Da Vinci Xi System)
第4代達文西(Xi System)於2014年美國FDA甫認證通過,這一代機型是目前國內外各大醫學中心的主力機型。第4代機型因應前一型機臺的不便性做了許多改良;如系統有更小、更輕巧的懸吊手臂、搭配全新設計的關節手腕,讓醫師有更大的手術範圍。針對不同視野的手術,病人不需要移動床位,機器手臂容易從各種角度進入體腔〔3〕。另外,系統有全新設計的攝影鏡頭,使系統擁有精緻的成像,大幅增進影像品質。內視鏡能架設於任何機械手臂上,提供更彈性的視野範圍。【左圖:雙和醫院副院長崔克宏醫師】
 第4代與之前的第3代機型有許多的變革,歸納重點如下:
第4代與之前的第3代機型有許多的變革,歸納重點如下:
1.採懸吊式手臂:手臂上的轉盤可做360度旋轉,而且可以前後伸縮,因此主機可以從任何角度進入手術區,如此可克服開刀房空間不足,以及麻醉科呼吸器位置的限制。前幾代達文西機身與手臂軸心只能固定在同一條軸線,病人兩腿之間的空間被機身佔據,助手難以在此空間進行操作。
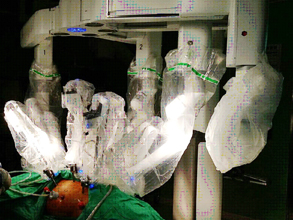
2.手臂自動調整系統:當攝影機位置鎖定手術目標後,其餘3隻手臂會自動調整最佳操作位置。前幾代達文西手臂間相對位置的調整必須靠外科醫師的經驗,即使有些微的誤差,很容易造成手臂間和助手操作空間的重疊干擾。【右圖:第4代達文西有更小、更輕巧的懸吊手臂、搭配全新設計的關節手肘、手腕,讓醫師有更大的手術範圍】
3.雷射光定位系統:可由投射下來的雷射光影輔助定位機身與病人的位置,外科醫師可輕易調整機身軸線與病人的夾角位置。而前幾代達文西在主機進入手術區域時,必須有一個人在前方指揮,以目測的方式估算角度,進出調整切入角度耗費許多時間。
4.手臂之間有更大的靈活度:第4代達文西系統的攝影機採用8mm直徑,與手臂Trocar的直徑相同,因此攝影機、3隻手臂的位置能夠隨手術情況需要做任意互換;此外手臂的直徑較細,大大增加手術的靈活程度。而前幾代達文西一旦Trocar的位置固定,則每隻手臂的功能便固定,無法任意更換。
▓單切口機器手臂腹腔鏡手術(Robotic Laparoendoscopic Single-site Surgery)
利用機器手臂做單一切口腹腔鏡攝護腺根除手術,首次報告在2008年〔4〕。在那之後,也有人利用單孔完成了許多手術,例如部分腎臟切除、腎盂成形手術等。然而,利用單孔來進行手術常常會造成機械手臂的碰撞,手術進行相當困難,因此在臨床上推廣不容易。日前美國食品藥物管理局(FDA)核准了單一切口達文西機器手臂,這個機型的特點是機器手臂是有彈性可以彎曲的,在切口處放置機器手臂,包括一個8.5毫米的攝影機,插入兩個半彎曲有彈性的手臂,搭配一個腹腔鏡輔助端口。
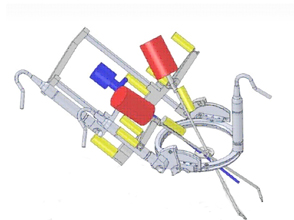 這項技術的主要局限,是機器手臂在腹腔內的碰撞〔5〕。原始的達文西平臺並非專門為Single Site手術設計的。此外,器械的移動是一種「全有或全無」的現象,也就是說無法移動一隻器械而不移動其他的器械。因為操作的不方便,大大降低泌尿外科醫師們對於Single Site的興趣,但也造就了未來Single Port的出現。【左圖:單一切口腹腔鏡手術,包括一個8.5毫米的攝影機,插入兩個半彎曲有彈性的手臂,搭配一個腹腔鏡輔助端口】
這項技術的主要局限,是機器手臂在腹腔內的碰撞〔5〕。原始的達文西平臺並非專門為Single Site手術設計的。此外,器械的移動是一種「全有或全無」的現象,也就是說無法移動一隻器械而不移動其他的器械。因為操作的不方便,大大降低泌尿外科醫師們對於Single Site的興趣,但也造就了未來Single Port的出現。【左圖:單一切口腹腔鏡手術,包括一個8.5毫米的攝影機,插入兩個半彎曲有彈性的手臂,搭配一個腹腔鏡輔助端口】
▓單孔機器手臂腹腔鏡手術(Single Port System, Da Vinci SP™)
 Single Port(SP)在2018年5月由美國FDA所通過。在一個25mm的Trocar當中,可容納一個12mm的攝影機,3個彎曲的半硬式機器人手臂Trocar和一個8mm的直助手Trocar。與以前的系統不同,手術醫師能夠在不移動其他器械的情況下,使器械臂圍繞其攝像機中心進行樞轉〔6〕。SP的一支手臂可以在一個位置保持靜止,而其餘的手臂可以重新定位,在特定的空間內進行手術。此外,所有的工作手臂都可以接聯在一起,以使該系統與標準的達文西平臺保持相容。【左圖:SP System的優勢在於可以讓所有的器械加上攝影機集中在一個2.5公分的傷口以內,使傷口更少、更小、更美觀,也可以大幅減低病人術後的傷口疼痛】
Single Port(SP)在2018年5月由美國FDA所通過。在一個25mm的Trocar當中,可容納一個12mm的攝影機,3個彎曲的半硬式機器人手臂Trocar和一個8mm的直助手Trocar。與以前的系統不同,手術醫師能夠在不移動其他器械的情況下,使器械臂圍繞其攝像機中心進行樞轉〔6〕。SP的一支手臂可以在一個位置保持靜止,而其餘的手臂可以重新定位,在特定的空間內進行手術。此外,所有的工作手臂都可以接聯在一起,以使該系統與標準的達文西平臺保持相容。【左圖:SP System的優勢在於可以讓所有的器械加上攝影機集中在一個2.5公分的傷口以內,使傷口更少、更小、更美觀,也可以大幅減低病人術後的傷口疼痛】
▓影像引導之機器人泌尿外科手術(Image-guided Robotic Urologic Surgery)
機器手臂近年來除了在操控性有長足的進步以外,在視覺輔助效果也有許多重大的變革。影像引導手術在泌尿外科領域已經非常成熟,旨在增強手術中的視覺效果輔助外科醫師進行手術。常用的技術包括了近紅外線螢光成像、增強虛擬現實平臺。
1.近紅外線螢光成像(Near-infrared Fluorescence Imaging):近紅外線螢光成像技術(Near-infrared fluorescence, NIRF)是目前最常用的視覺加強技術,在達文西系統當中第3代(Si),跟第4代(Xi)均配有這項功能,可以在手術過程當中將「一般影像」以及「螢光影像」做即時的更換,以利於手術當中即時辨認。NIRF的成像技術,協助外科醫師來辨認血管的構造,其效果比用肉眼來看要來得更好。
NIRF所使用的藥劑:吲哚菁綠(Indocyanine green, ICG)染料是一種FDA批准的水溶性染劑,ICG經過靜脈注射之後,分佈全身血管豐富的組織,最後由NIRF的鏡頭所偵測到。ICG注射相對是安全的,因為它靜脈給藥後被限制在血管腔內、在血漿中的代謝快(3~5分鐘),以及組織毒性低至0.34%〔7、8〕。機器人的攝影機將805nm波長的雷射,射向標的器官,而標的器官血液中的ICG吸收到此波長的能量後,會釋放出螢光,讓NIRF的攝影機所偵測到。達文西機臺上的軟體會疊重組這些綠色圖像,讓手術者可以知道這個標的器官是否有豐富血流的存在。
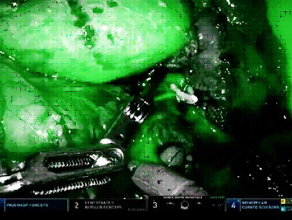 在健康的腎實質中,ICG與酶轉運蛋白雙轉位酶結合,腎臟組織在充滿ICG的血液中會釋放出綠色的螢光。但是腎臟腫瘤該轉運蛋白缺乏,因此不會釋放出螢光。這個手術技術可以讓切除腫瘤後的腎臟做最大腎功能的保留,另外在Hyper-selective Clamping 甚至Off-clamping腎臟腫瘤切除手術當中,也廣泛利用了這個成像技術。ICG也可以應用在攝護腺根除手術RARP中,利用此成像技術可以輔助神經血管叢(Neurovascular Bundle, NVB)的識別和骨盆腔淋巴結的廓清手術〔9〕。ICG與PSMA結合以協助術中淋巴結廓清,很有可能是未來手術的重點研究,因為PSMA PET成像在攝護腺癌分期中的使用越來越多,這項發展將使外科醫師能夠將術前、術中的影像作比較,更進一步這些增強成像方式的準確性。但這仍處於研究的臨床前階段。【左圖:近紅外線螢光成像】
在健康的腎實質中,ICG與酶轉運蛋白雙轉位酶結合,腎臟組織在充滿ICG的血液中會釋放出綠色的螢光。但是腎臟腫瘤該轉運蛋白缺乏,因此不會釋放出螢光。這個手術技術可以讓切除腫瘤後的腎臟做最大腎功能的保留,另外在Hyper-selective Clamping 甚至Off-clamping腎臟腫瘤切除手術當中,也廣泛利用了這個成像技術。ICG也可以應用在攝護腺根除手術RARP中,利用此成像技術可以輔助神經血管叢(Neurovascular Bundle, NVB)的識別和骨盆腔淋巴結的廓清手術〔9〕。ICG與PSMA結合以協助術中淋巴結廓清,很有可能是未來手術的重點研究,因為PSMA PET成像在攝護腺癌分期中的使用越來越多,這項發展將使外科醫師能夠將術前、術中的影像作比較,更進一步這些增強成像方式的準確性。但這仍處於研究的臨床前階段。【左圖:近紅外線螢光成像】
NIRF可以顯示出尿路上皮的血液灌流,所以可用來輔助尿路系統的重建手術〔10〕。注射ICG可以識別腎盂成形術(Pyeloplasty),輸尿管再植(Ureteral Reimplantation)和輸尿管對接手術(Ureteroureterostomy)中輸尿管的缺血性節段。與正常尿路上皮相比,灌注不良的缺血段會顯得較暗,因此有助於識別健康組織以進行重建。NIRF也已用於膀胱切除術(Radical Cystectomy)腸道尿路重建中,用以識別腸系膜血管,並確認欲接合的輸尿管末端之血流〔11〕。
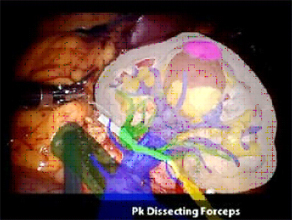 2.增強虛擬現實平臺(Augmented Visual Reality Platform):增強虛擬現實(AR)可將特定於患者的模型疊加到手術區域上以輔助手術。AR的優勢在於可以將標的器官的影像,跟手術時外科醫師在Console所看到的影像兩者進行重疊,更準確解剖學關係可以及促進正確的腫瘤切除,確保手術切緣陰性〔12〕。手術中同時使用經直腸超音波和導航基準標記,將神經血管叢(Neurovascular Bundle)的影像重疊在攝護腺的影像上。AR是透過軟體平臺,利用核磁共振(MRI)和電腦斷層掃描(CT)圖像,來進行實體影像跟虛擬影像的重疊。AR的技術也可以使用在機器手臂部分腎臟切除手術之中。【右圖:增強虛擬現實平臺是透過軟體平臺,利用核磁共振和電腦斷層掃描圖像,來進行實體影像跟虛擬影像的重疊】
2.增強虛擬現實平臺(Augmented Visual Reality Platform):增強虛擬現實(AR)可將特定於患者的模型疊加到手術區域上以輔助手術。AR的優勢在於可以將標的器官的影像,跟手術時外科醫師在Console所看到的影像兩者進行重疊,更準確解剖學關係可以及促進正確的腫瘤切除,確保手術切緣陰性〔12〕。手術中同時使用經直腸超音波和導航基準標記,將神經血管叢(Neurovascular Bundle)的影像重疊在攝護腺的影像上。AR是透過軟體平臺,利用核磁共振(MRI)和電腦斷層掃描(CT)圖像,來進行實體影像跟虛擬影像的重疊。AR的技術也可以使用在機器手臂部分腎臟切除手術之中。【右圖:增強虛擬現實平臺是透過軟體平臺,利用核磁共振和電腦斷層掃描圖像,來進行實體影像跟虛擬影像的重疊】
機器人手術,未來會在泌尿外科中扮演越來越重要的角色,傷口小、組織破壞少、病人恢復快,是目前外科手術的主流觀念。機器手臂手術合併影像加強、AI人工智慧影像重疊的技術,在未來的臨床應用中也會越來越普遍。機器人技術在內視鏡手術的過程中也將發揮越來越重要的角色,它將重新定義我們對這些手術的態度與的看法,機器手臂的發展,將改變外科的遊戲規則,更嶄新的技術將使外科醫生能夠更有效率地執行手術。機器手臂手術技術的發展,對患者而言,無疑是一大福音。(文/臺北癌症中心提供)
【參考文獻】
- Aron M: Robotic surgery beyond the prostate: Robotic surgery beyond the prostate. Indian J Urol. 2014; 30(3): 273–4.
- Yaxley JW, Coughlin GD, Chambers SK, et al.: Robot-assisted laparoscopic prostatectomy versus open radical retropubic prostatectomy: early outcomes from a randomised controlled phase 3 study. Lancet. 2016; 388(10049): 1057–66.
- Comparison of the 2 generations of da Vinci systems. Surgical laparoscopy, endoscopy & percutaneous techniques, 2016, 26.5: 417-423.
- Kaouk JH, Goel RK, Haber GP, et al.: Single-port laparoscopic radical prostatectomy. Urology. 2008; 72(6): 1190–3.
- Autorino R, Kaouk JH, Stolzenburg JU, et al.: Current status and future directions of robotic single-site surgery: a systematic review. Eur Urol. 2013; 63(2): 266–80.
- Maurice MJ, Ramirez D, Kaouk JH: Robotic Laparoendoscopic Single-site Retroperitioneal Renal Surgery: Initial Investigation of a Purpose-built Singleport Surgical System. Eur Urol. 2017; 71(4): 643–7.
- Bates AS, Patel VR: Applications of indocyanine green in robotic urology. J Robot Surg. 2016; 10(4): 357–9.
- Autorino R, Zargar H, White WM, et al.: Current applications of near-infrared fluorescence imaging in robotic urologic surgery: a systematic review and critical analysis of the literature. Urology. 2014; 84(4): 751–9.
- Nakajima T, Mitsunaga M, Bander NH, et al.: Targeted, activatable, in vivo fluorescence imaging of prostate-specific membrane antigen (PSMA) positive tumors using the quenched humanized J591 antibody-indocyanine green (ICG) conjugate. Bioconjug Chem. 2011; 22(8): 1700–5.
- Bjurlin MA, Gan M, McClintock TR, et al.: Near-infrared fluorescence imaging: emerging applications in robotic upper urinary tract surgery. Eur Urol. 2014; 65(4): 793–801.
- Manny TB, Hemal AK: Fluorescence-enhanced robotic radical cystectomy using unconjugated indocyanine green for pelvic lymphangiography, tumor marking, and mesenteric angiography: the initial clinical experience. Urology. 2014; 83(4): 824–9.
- Hughes-Hallett A, Mayer EK, Marcus HJ, et al.: Augmented reality partial nephrectomy: examining the current status and future perspectives. Urology. 2014; 83(2): 266–73.
